



Background
The acquisition of high-resolution, georeferenced imagery is a fundamental prerequisite for the detection and
documentation of archaeological heritage. Structure from Motion (SfM) is a popular and robust method for producing
3D reconstructions from series of overlapping images (multi-view reconstruction). It provides heritage professionals
with a flexible and low-cost method for the documentation and digital preservation of objects of interest,
especially complex architectural remains.
SfM currently suffers from two fundamental limitations that restrict the
degree to which the quality of the resulting models can be assured: the approach is computationally demanding,
and the reconstructed point clouds tend to be inhomogeneous. However, the video material produced by UAV-borne
cameras contains massively overlapping image data and therefore constitutes ideal input material for the SfM-based
reconstruction of buildings, sites or entire landscapes. In addition, parallel processing of data allows the
rapid production of preview models useful for quality assurance.
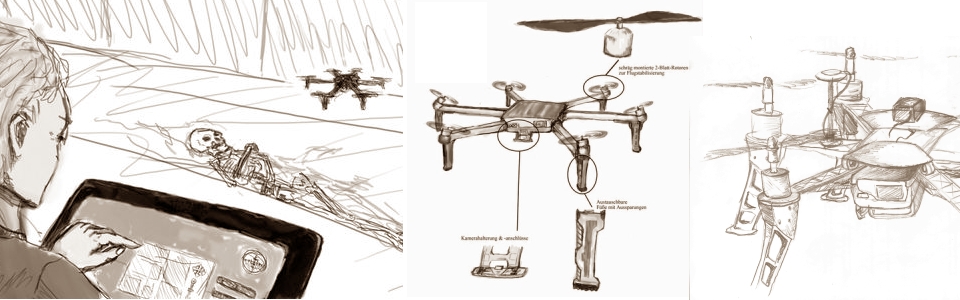
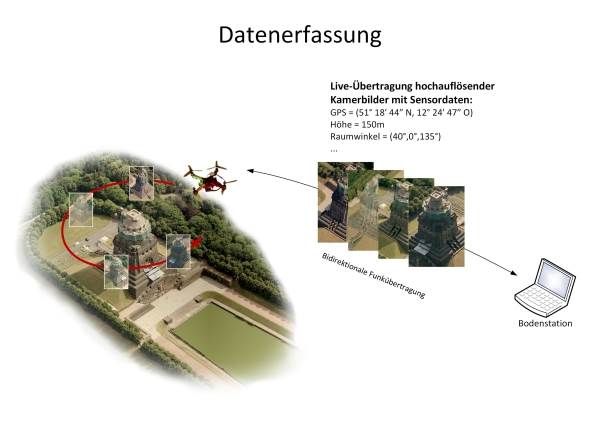
The Archaeocopter project is working to develop time and cost efficient technologies for acquiring high-fidelity,
high-resolution imagery and 3D data using UAV that are cheap to construct, easy to operate and geared towards
applications in archaeology and heritage management. We will share insight into UAV design for archaeological
applications and issues such as carrying capacity, flight stability and operational safety.
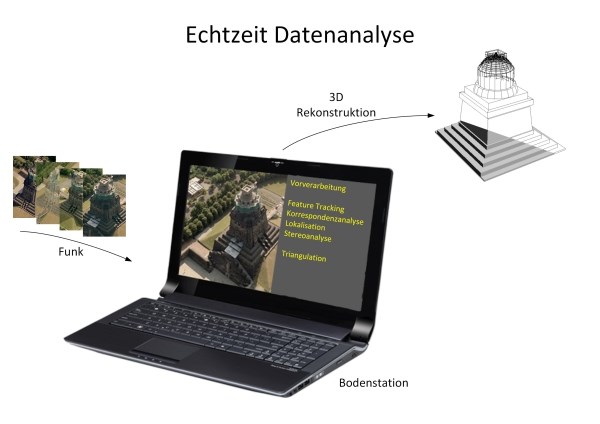
Among our more challenging aims is the implementation of near-realtime sparse 3D reconstruction, that would
allow the operator to immediately validate data quality and density.
In order to optimise the hardware and software design for real-world applications, the project’s research and
development work is continuously supported and guided by the state heritage management authorities of Saxony,
as well as by academic partners at the University of Applied Sciences Dresden, the Freie Universität Berlin
and the German Archaeological Institute.
Offline processing for 3D reconstruction
There exist several solutions for reconstructing 3D models from series of overlapping images. We evaluate free, open source and proprietary software projects. The full details of our processing workflow and software tool chain will be published soon on these web pages. The following is a list of software that we have used.
Visual SFM (freeware)
VisualSFM is a freeware application with a relatively user-
friendly, graphical user interface (GUI) for feature detection, image
matching, sparse model reconstruction and georeferencing. It is based on
the popular SfM approach and was developed by Changchang Wu.
The reconstruction system integrates several projects: SIFT on GPU (SiftGPU),
Multicore Bundle Adjustment,
and Towards Linear-time Incremental Structure from Motion.
VisualSFM runs very fast by exploiting multicore parallelism in feature detection, feature matching, and bundle adjustment.
PMVS (open source) and CMPMVS (freeware)
VisualSFM provides interfaces to run Yasutaka Furukawa's PMVS/CMVS tool and to prepare data for Michal Jancosek's CMPMVS. Both PMVS and CMPMVS are software for multi-view stereo reconstruction. They take the camera reconstructions produced by VisualSFM and produce very dense point clouds (whereas VisualSFM produces sparse 3D models of several thousands of points, these tools produce millions of points).
Bundler (freeware)
From the Bundler web pages: "Bundler is a freeware
structure-from-motion (SfM) system for unordered image collections.
Bundler takes a set of images, image features, and image matches as
input, and produces a 3D reconstruction of camera and (sparse) scene
geometry as output. The system reconstructs the scene incrementally, a
few images at a time, using a modified version of the Sparse Bundle
Adjustment package of Lourakis and Argyros as the underlying
optimization engine. Bundler has been successfully run on many Internet
photo collections, as well as more structured collections.
Bundler is the first SfM solution to become widely
available as an open source solution. It still does its job very
well, but does not utilise modern GPUs for faster processing and
does not offer georeferencing of 3D models.
Apero/MicMac (open source)
Apero/MicMac is a very powerful open source suite for 3D reconstruction from images. It includes SfM (Apero) and a dense point cloud reconstruction system (MicMac) that is based on depth map fusion. While Apero is by far the most flexible SfM solution available, MicMac produces exceedingly dense 3D point clouds from just a few images. We are currently evaluating this suite more fully.
openMVG (open source)
OpenMVG (open Multiple View Geometry) is an open source library for 3D reconstruction. We are currently evaluating this suite more fully.
Agisoft PhotoScan Pro (proprietary)
Agisoft PhotoScan (Pro) is an integrated, GUI-driven application that covers the entire workflow, from image matching and masking to SfM camera reconstruction, dense point cloud reconstruction and texturisation. It also includes tools for georeferencing and export of orthophotos. Unlike many other proprietary solutions, this one is available for all major operating systems.
Postprocessing
Postprocessing steps include surface reconstruction and texturisation of the triangulated point cloud, as well as cleaning and simplification of the final, triangulated models (meshes).
MeshLab (open source)
From the Meshalb web pages: MeshLab is an open source, portable, and extensible system for the processing and editing of unstructured 3D triangular meshes. The system is aimed to help the processing of the typical not-so-small unstructured models arising in 3D scanning, providing a set of tools for editing, cleaning, healing, inspecting, rendering and converting this kind of meshes.
CloudCompare (open source)
CloudCompare is an open source software for manipulation large 3D point clouds. It offers some unique abilities, such as point cloud matching, that make it a useful companion to MeshLab.
Blender (open source)
From the Blender web pages: Blender is a free and open source 3D animation suite. It supports the entirety of the 3D pipeline—modeling, rigging, animation, simulation, rendering, compositing and motion tracking, even video editing and game creation.
Related projects
Flight riot is a project that advocates the use of UAV for geospatial data acquisition. Lightcraft Technology's webpages have an interesting discussion about a photogrammetry workflow (involving the proprietary modo system for postprocessing). Jesse's blog provides a great entry point for learning about how to use VisualSFM, PMVS and MeshLab in a photogrammetry workflow. Project ArchEye is another project that explores the use of UAVs and photogrammetry in archaeology.